
About
Background
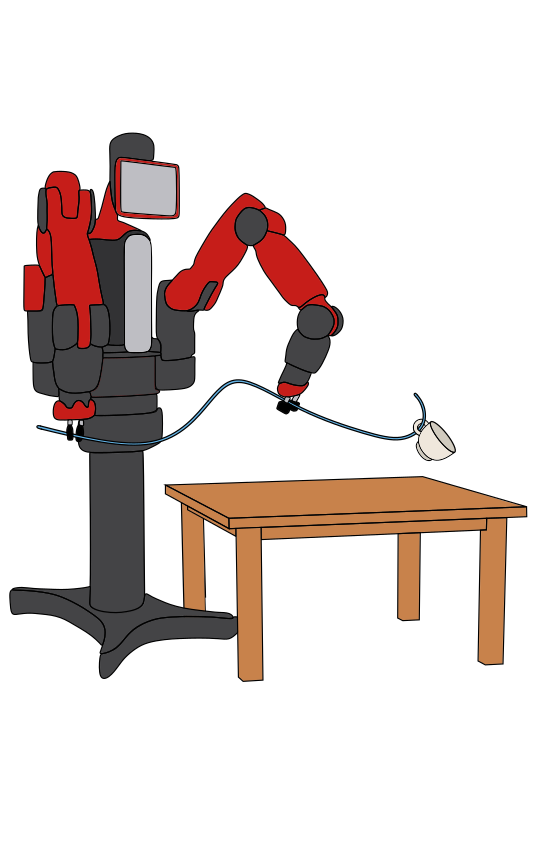
I am a Research Scientist at Fauna Robotics, where we're
on a mission to create a world in which human and robotic fauna coexist, collaborate, and flourish together.
I'm specifically focused on perception in the home -- how a robot should map, localize in, and understand
its environment so that it can intelligently plan, interact, and discuss its physical world.
From 2021 to 2023 I was a Robotics Engineer at Wayve, working
on a machine learning approach to autonomous vehicles. I focused on
sensor fusion, and how to use multiple sensing modalities (cameras, gps, radar, etc.)
to accurately estimate a robot's state (as well as dynamic objects in its environment) and plan its future actions.
In September 2021 I defended my Ph.D. thesis titled Co-Design of Bodies and Strategies in the Center for Robotics and Biosystems at Northwestern University,
advised by Todd D. Murphey.
I was part of the Interactive and Emergent
Autonomy Lab, where my research focused on computational methods in data-driven control,
information theory in physical systems, and embodied intelligence.
Research Interests
I am interested in how to optimally design robots -- by taking into account the relationship between
hardware (including physical shape, sensors, and actuators),
software (control policies, planning algorithms, and learning architecture),
and the robot's goal.
In nature, biological organisms jointly evolve both their morphology and their neurological capabilities to improve their chances for survival.
Consequently, task information is encoded both in their brains and their bodies.
In robotics, the development of complex control and planning algorithms often bears sole responsibility for improving task performance.
My work has aimed to reduce the dependence on centralized control for task execution
by algorithmically designing and iterating on both a robot's controller and its physical body.
Projects
Simultaneous Co-Design of A Flexible Tool and Optimized Strategy
The design of a robot, or a tool, for a specific task significantly depends on how the robot or the tool will be used to attempt the task. For example, if the goal is for a bipedal robot to locomote forward, the optimal location of a knee along the length of the robot's leg depends on what type of gait the robot plans to implement. In this project, I use the example of a bendable wire, which can be useful as a tool in a wide variety of tasks (e.g., manipulating an object that is out of reach). A robot must simultaneously design the tool shape and plan a control strategy for how to use the tool to achieve a task.
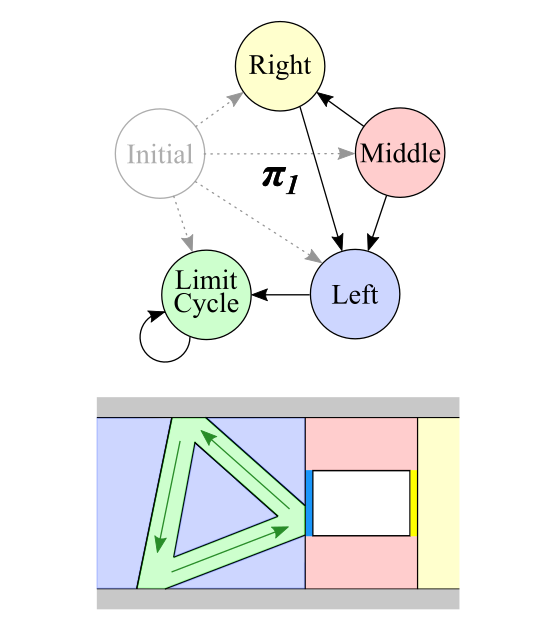
Bayesian Particles: Minimal Multi-Agent Cooperation
In this project, physically limited learning particles collaborate (and work in parallel) to navigate through cyclic graphs. Through collaboration with chemical engineers at MIT, including Albert T. Liu, I have been considering the problem of designing microscopic robots to achieve complex goals in a stochastic environment (for example, navigating the circulatory system to assisst in an immune response), where they might have to change their control policies, communicate with each other, and deal with uncertainty -- all with minimal capabilities and only a few bits of memory.
Associated Publications
Circulatory networks enable efficient distributed learning
Ana Pervan Jamison Weber, Karalyn Baird, Thomas A. Berrueta, Matthew Elwin, Andrea W. Richa, and Todd D. Murphey
In Review, 2023.
Bayesian Particles on Cyclic Graphs
Ana Pervan and Todd D. Murphey
IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2020.
Autoperforation of Two-Dimensional Materials to Generate Colloidal State Machines Capable of Locomotion
Albert Tianxiang Liu, Jing Fan Yang, Lexy N. LeMar, Ge Zhang, Ana Pervan, Todd D. Murphey, and Michael Strano
Faraday Discussions, Royal Society of Chemistry, 2020.
Towards Robust Motion Planning for Synthetic Cells in a Circulatory System
Thomas A. Berrueta, Ana Pervan, and Todd D. Murphey
Workshop on Robust Task and Motion Planning at Robotic Science and Systems (RSS) Conference, 2019.
Algorithmic Design for Embodied Intelligence in Minimal Robots
A conflict exists between equipping a robot with what is sufficient and what is necessary—what can enable a robot to succeed (and is likely complex) and what is minimally required for it to achieve its goal (and is necessarily simple). This is especially evident when designing for embodied computation—robots without any on-board, CPU-based, traditional computational capabilities. I developed an iterative algorithm to compute feasible control policies that achieve a desired objective while maintaining a low level of design complexity and a high level of task embodiment.
Associated Publications
Algorithmic Design for Embodied Intelligence in Synthetic Cells
Ana Pervan and Todd D. Murphey
IEEE Transactions on Automation Science and Engineering (T-ASE), 2020.
Colloidal Robots
Albert Tianxiang Liu, Marek Hempel, Jing Fan Yang, Allan M Brooks, Ana Pervan, Volodymyr B. Koman, Ge Zhang, Daichi Kozawa, Sungyun Yang, Daniel I Goldman, Marc Z Miskin, Andréa W Richa, Dana Randall, Todd D. Murphey, Tomás Palacios, and Michael S. Strano
Nature Materials, 2023.
Algorithmic Materials: Embedding Computation within Material Properties for Autonomy
Ana Pervan and Todd D. Murphey
Robotic Systems and Autonomous Platforms: Advances in Materials and Manufacturing, Elsevier, 2018. Eds. M. Strano and S. Walsh.
Low complexity control policy synthesis for cyber-free robot design
Ana Pervan and Todd D. Murphey
Workshop on the Algorithmic Foundations of Robotics (WAFR), 2018.
Collective Behaviors and Emergent Computation
The main element of emergent behavior is the ability of the local sensing and actuation of individuals to result in significant, global capabilities of the collective. To identify and exploit emergent behaviors, I examined the information that motion and dynamics carry about the underlying task being executed. I define task embodiment as the amount of task information encoded in an agent’s motions, and use it to take advantage of broken symmetries in a system and execute sophisticated collective behaviors --- all with minimal, local sensing and actuation capabilities.
Associated Publications
A robot made of robots: emergent transport and control of a smarticle ensemble
William Savoie, Thomas A. Berrueta, Zachary Jackson, Ana Pervan, Ross Warkentin, Shengkai Li, Todd D. Murphey, Kurt Wiesenfeld, and Daniel I. Goldman
Science Robotics, vol. 4, no. 34, 2019.
Dynamical system segmentation for information measures in motion
Thomas A. Berrueta, Ana Pervan, Kathleen Fitzsimons, and Todd D. Murphey
IEEE Robotics and Automation Letters, vol. 4, no. 1, 2019.
Primitives and Logic for Robot Comparisons
Inspired by micro-scale robotic systems and active matter, my collaborators (Alli Nilles and Thomas Berrueta) and I examine several different robot designs and systems. I performed a task-centered formal analysis of several robot designs, emphasizing the information requirements of goal completion under different initial conditions, as well as what is required to recognize irreparable task failure. The role of boundary conditions in a heterogenous active matter system in a bounded domain was also examined.
Associated Publications
Information Requirements of Collision-Based Micromanipulation
Ana Pervan*, Alexandra Q. Nilles*, Thomas A. Berrueta*, Todd D. Murphey, and Steven M. LaValle
Workshop on the Algorithmic Foundations of Robotics (WAFR), 2020.
Corralling Active Brownian Particles With ``Active Billiard" Particles
Alexandra Q. Nilles, Ana Pervan, Thomas A. Berrueta, and Todd D. Murphey
Bulletin of the American Physical Society, 2020.